新手入门¶
专业名词解释¶
aircraft:任何可以飞或者可以携带物品还是搭载旅客的飞行器统称为飞机(航空器).
uav:无人驾驶飞机
vehicle:飞行器
airplane/plane/aero-plane :有机翼和一个或多个引擎的飞行器统称为飞机
Drone:无人航空器,典型的有四旋翼,六旋翼,飞机模型,固定翼,垂起,直升机模型
aerial:空中的,从飞机上的.
四旋翼(Quadcopter) :无人驾驶飞行器,一般带有四个螺旋桨和一个电子稳定系统
多旋翼:无人驾驶飞行器,带有一个电子稳定系统和螺旋桨的数量取决于三旋翼,四旋翼,六旋翼,八旋翼或者更多.
飞行控制器/自动驾驶:
- 1.设计了用于控制多旋翼,飞机或者是其他飞行器的一种专用电路板,例如:pixhawk,Ardupilot,Naze32,CC3D
- 2.多旋翼控制的软件,例如:PX4,APM,CleanFlight,BetaFlight.
固件:主要用于嵌入式系统的软件,例如:飞控系统,电调系统(ESC)
电机:旋转多轴螺旋桨的电动机,通常使用的是无刷电动机,这些电机需要电调.
电调/电机控制器:ESC,电子调速控制器,用于控制无刷电机速度的专用电路板.它使用PWM飞行控制器控制.
电池:无人机航空器的可充电电池.四旋翼常用的是LiPo锂电池
电池芯数:无人机航空器常用的电芯数(2s~6s),每节锂电池的最大电压4.2V,正常充电电压3.7V,电池的电压是每节锂电池电压串联的总和,P200无人机使用的是4s锂电池
遥控器/无线电控制设备:远程遥控操控四旋翼的设备,我们称为遥控器.远程遥控器控制的的前提是接收机需要连接到飞控中.P200无人机使用的是富斯i6s.
遥测设备:
解锁:Arming,飞机准备飞行的状态,当遥控器慢慢推动油门摇杆时或者发送带有目标点的外部命令时,飞机将开始飞行.通常解锁的操作是,油门最低+偏航角最大,一般情况下,解锁之后螺旋桨会以怠速转动,与之相反的状态是上锁,Disarmed
PX4:非常流行的开源飞控代码,它可以在pixhawk系列嵌入式主板中运行.P200所使用的就是pixhawk4嵌入式主板.
NVIDIA TX2/NANO:性能较强大的板载计算机,也是P200中所使用的板载计算机.
APM/Ardupilot:最开始的时候是为Arduino开发板创建的开源飞控.现在也可以兼容pixhawk系列嵌入式主板.
Mavlink:无人航空器,地面站以及通过无线信道的其他设备相互间通信协议,Mavlink是一个用于无人机的通讯协议,在这个通讯协议下有很多很多消息类型。外部与飞控建立连接,绝大部分是利用Mavlink协议,传递的是Mavlink消息。比如:地面站、 mavros
ROS:编写复杂机器人应用程序的流行框架.Robot Operating System (ROS) 是一种得到广泛使用的机器人操作与 控制系统软件框架。其提供了一个标 准的操作系统环境,包括硬件抽象、 底层设备控制、通用功能的实现、进 程间消息转发和功能包管理等.
mavros:连接ROS和mavlink协议之间的库.
uORB:uORB是一种类似ROS主题的发布,订阅机制,但大大简化了其复杂性并将其应用到嵌入式环境之中.
硬件介绍¶
主要向介绍三款科研无人机开发平台,第一款是型号为P200-A2-TX2的P200系列无人机

该无人机包含有pixhawk4基础套件,完成px4最基本的飞行功能;其次有激光雷达rplidar A2,在室内完成激光雷达slam定位;单目视觉相机基于openCV的图像识别,视觉引导降落等;板载计算机 NVIDIA TX2作为核心来处理这些外部设备获取到的原始数据,最后通过mavros发送至飞控之中.在板载计算机中包含有视觉处理ROS包,rplidarROS包,cartag算法ROS包,以及核心控制功能包px4_command.
更多详细参数,功能可以查看 淘宝 产品详情.
第二款型号为 JCV4-410 无人机

Amovlab开源无人机开发平台 pixhawk4,同(px4/APM)一键起飞,一键返航,室外定点/定高,mission,电子围栏等能力.具有强扩展空间,支持扩展多种设备.提供科研建模电机拉力参数,配合新课程 基于模型(MATLAB)开发.
更多关于该型号无人机的电机拉力实测表请查看 淘宝 产品详情的参数
第三款型号为P200-T265-TX2的P200系列无人机

硬件清单:
标配:
| 机体 | P200含电机电调 | 台 | 1 |
| 主控 | pixhawk4 | 个 | 1 |
| GPS | M8N | 个 | 1 |
| 螺旋桨 | 9寸 | 支 | 8 |
| 遥控器(含接收机) | 富斯I6S | 台 | 1 |
| 遥控器电池 | 镍氢 | 个 | 1 |
| 镍氢电池充电器 | 镍氢充电器 | 个 | 1 |
| Intel双目相机 | T265 | 个 | 1 |
| 动力电池 | 4200mAh/4S | 个 | 1 |
| 数传 | WIFI数传(AP模式) | 个 | 1 |
| 平衡充电器 | A400 | 台 | 1 |
选配:
| 板载计算机(二选一) | NVIDIA Nano | 个 | 1 |
| 板载计算机(二选一) | NVIDIA TX2 | 个 | 1 |
| 激光定高雷达 | TFmini Plus | 个 | 1 |
无人机参数:
| 无人机外形尺寸 | 322 X 316 X 197 mm |
| 轴距 | 410 mm |
| 整机重量飞控最大倾角 | 5’ |
| 电机 | SunnSky X2213 KV980 或者 T-Motor Air 2216 KV880 |
| 螺旋桨 | 9寸,10寸自锁桨 |
| 电调 | Hobbywing 30A |
| 电池 | 4200mAh/4S |
本科研无人机的更多详细,可以直接去 淘宝 查看更多详细参数.
软件介绍¶
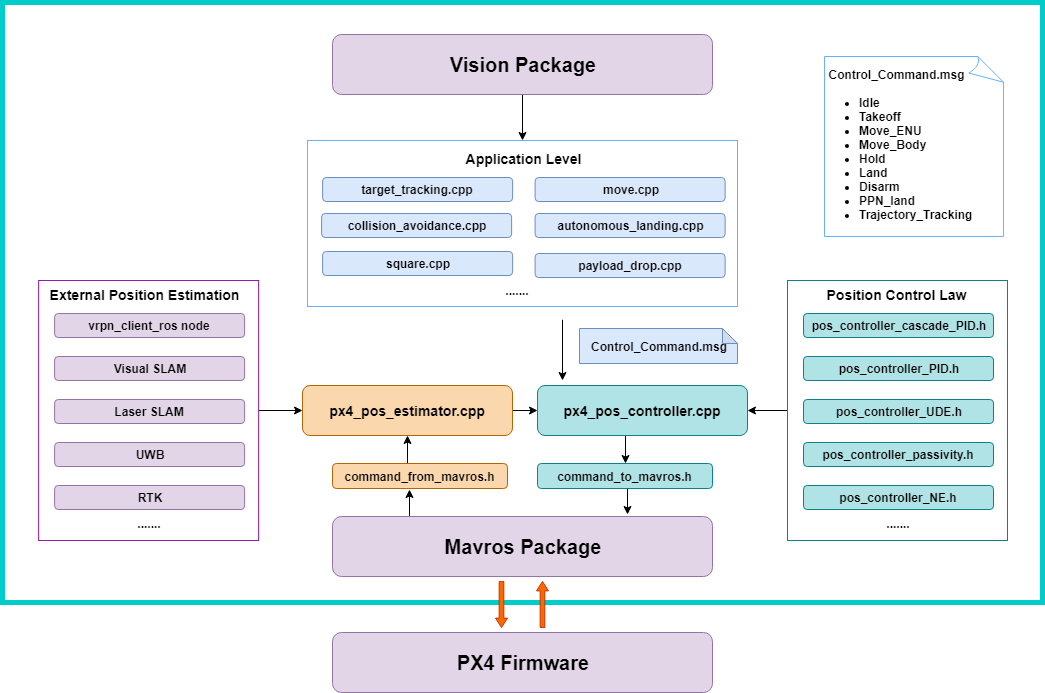
px4_command功能包是一个基于PX4开源固件及Mavros功能包的开源项目,旨在为PX4开发者提供更加简洁快速的开发体验。目前已集成无人机外环控制器修改、目标追踪及避障等上层开发代码, 后续将陆续推出涵盖任务决策、路径规划、滤波导航、单/多机控制并且提供完整的三维软件仿真(Gazebo/MATLAB)等无人机科研及开发领域的功能。
PX4:非常流行的开源飞控代码,PX4 Firmware可以烧写pixhawk系列嵌入式主板中并运行.它的官方Github固件在 这里 .在我们的 Github 中,也 fork 了官网的固件,之后我们修改过的PX4 Firmware会放到该github上面.
ROS 是一个平台,不仅提供各种开源代码,还提供开源代码间 互相通信的机制。比如要搭建一个机器人,电机、力传感器、摄 像头这些设备的底层驱动ROS都可以提供;还提供给你PID控制 代码,SLAM算法等等;还写了一整套通讯协议, 让你实现各个程序间的通信,你只需要下载这些功能包,写一个 简单的启动脚本,就能运行起来一个机器人系统。
Mavros:就是mavlink与ROS连接的库,无人机与板载计算机就是通过这种方式相互交互的.
我们可以简单的将本无人机中包含的代码分为以下几个部分:视觉端代码、Mavros代码、飞控代码.每一块代码各有分工,一个人也可能可以完全掌握这三部分代码,单需要很长时间。所以根据自己的需求,选择自己要学习的部分,事半功倍。
视觉端代码: 视觉端代码这里不叙述,基本一个功能对应一个文件夹或者cpp文件。比如做追踪,我们关心的是目标机体系下的位置,那么视觉端最后的输出就是目标的位置,如果不探讨视觉的具体代码,知道这些就足够了。
Mavros代码: Mavros代码分为上层开发代码,位置环代码,底层代码。底层代码是下载mavros功能包时就有的(但我们也有一些小修改,具体看配置文件夹),位置环代码和上层开发代码是我们提供的核心代码。其中,位置环代码是我们移植了PX4中的位置环串级PID算法,然后二次封装了一些接口供用户使用,上层代码则是针对具体应用(如追踪、降落、避障等)。
飞控代码: 飞控中代码的修改和优化没有太大的必要,除非有对底层修改的必要,本无人机中只是针对特定的部分进行了修改。但是需要了解:飞控中的数据流
安全指引¶
飞行试验前你要做的:
1.稳固的机架。做实验,特别是开发性质的实验,炸机是难免的,即使不炸机也常常会有不正常降落(紧急情况下从offboard切换回手动,或者直接kill电机),从个人开发经验来看,机架要耐摔耐撞比较重要。由于是室内飞行,一般飞行高度会在0.5-2米之内,P100直接断电降落也不会对飞机造成太大了影响,可能螺丝会松以及粘贴的零部件会松,不会造成大的损伤。所以飞行前要检查飞机各个部件是否稳固,飞机螺旋桨是否会割到某些线。
2.手动试飞。一个无人机要想能够自主飞行(内环+外环),首先要手动飞行稳定(内环)。如果你不是天天做实验,保证飞机的连续的一个良好的状态,建议每次实验前手动试飞检查一下飞机是否正常。
3.熟悉程序。前两步都没问题,要进行任务级别的开发了(比如追踪等等),首先就是要熟悉程序,带着注释看代码还是很快的,至少了解一下程序的运行逻辑。在不上桨的情况下先测试下程序的运行是否正常。
4.离线测试。基本上每一个程序都有详细的打印界面,会输出传感器或者飞机的状态信息。以追踪为例,在不解锁的情况下,运行所有程序,遥控器切offboard模式,拿一个目标标志物在镜头前面左右摆动,查看程序运行的情况,观察机载电脑给飞控发送的指令是否正确。
以上四步是真正飞行试验前必做的。虽然P200具备一部分到手飞的功能,但是你还是需要去熟悉这台飞机和代码,不然出了问题你根本不知道怎么去解决和优化。
说明:
- 1.P100仍属于开发性质的平台,并不像大疆或者其他商业开源平台那样稳定。所以实验中会遇到各种各样的问题,大部分问题如果通过重启飞控或者程序解决了,就不需要咨询售后了,因为我们也天天遇到。
- 2.做实验是有一定危险的,注意安全第一,紧急情况直接切手动降落.
- 3.我们会陆续提供各个demo的教学视频,更加直观的指导大家操作
- 4.我们也会定期开设自主无人机及mavros培训课程,课上会具体讲授开发流程及注意事项,敬请关注。
- 5.祝大家飞行顺利,愉快!